RC Car: "The Cookie Monster"
A 3-speed infrared remote controlled robotic vehicle that optimizes speed, torque, impact durability, and cost within competition constraints.

The final iteration of the RC Car: "The Cookie Monster".
Problem
- Design and manufacture a vehicle that successfully completes 7 competition events: speed, strength, reverse, impact durability, agility, rapid disassembly, and cost.
- Construct an operational transmission system capable of achieving vehicle velocity of 1 m/s using only 1 DC motor, 1 servo, Arduino Uno, and 1 IR sensor.
- The vehicle must be able to withstand repeated impacts with a 5 kg weight dropped from a height of 0.25 m.
Approach & Ideation
- The ideation process included background research into existing solutions, and sketches of potential solutions.
- My team and I used the design process to ideate all possible solutions, then selected the best candidate using a weighted decision matrix.
- Following our design selection, we began the CAD modeling process.
- Derived optimal gear ratios using targeted performance metrics.
- Chosen transmission was a sequential dog clutch transmission with 2 forward gears and a reverse, with shifting actuated by the servo mounted on a cylindrical cam, driving selector forks.
- Neoprene foam was chosen as the impact survival mechanism.
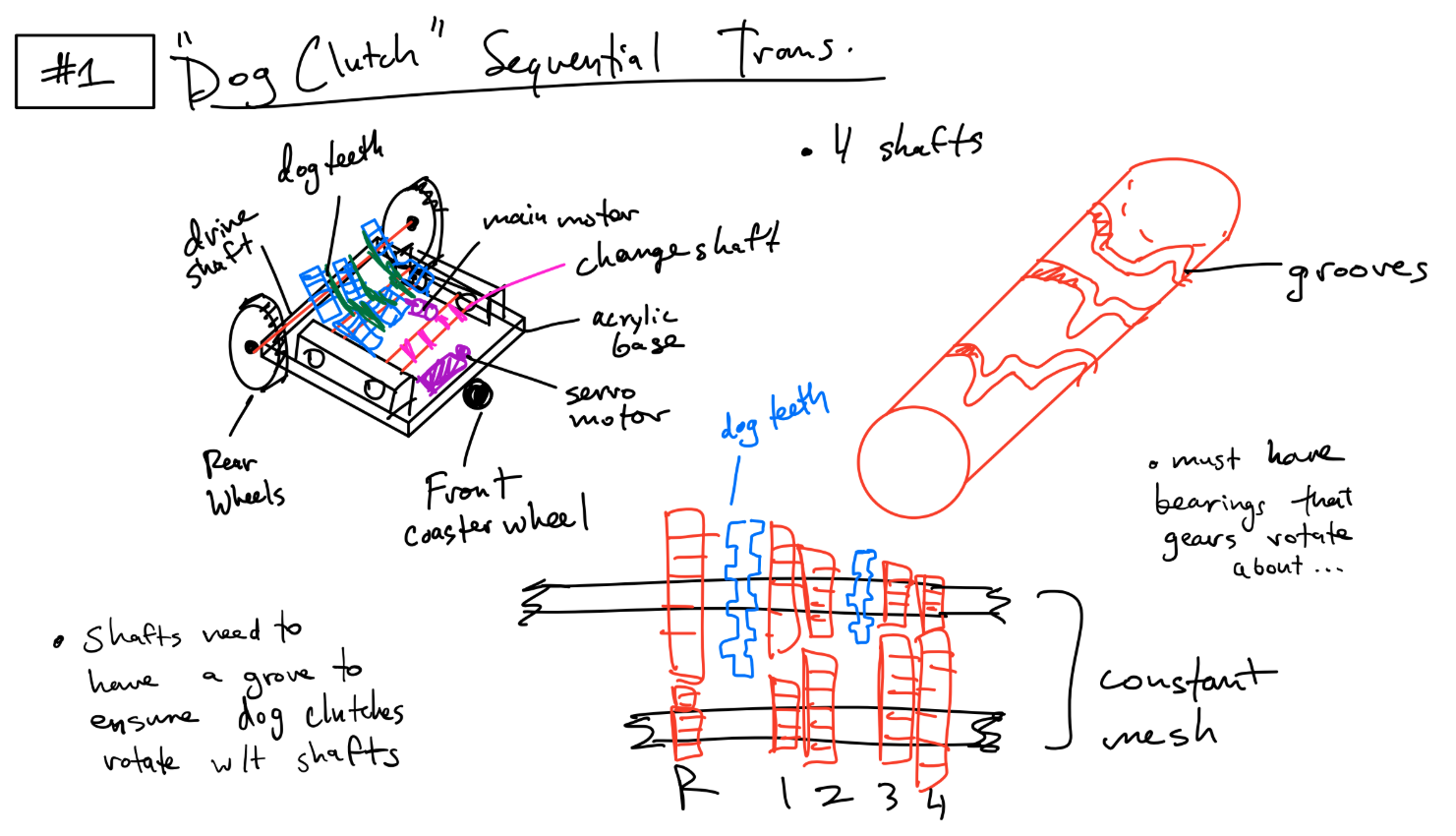
Sketches of transmission designs were used to illustrate mechanical concepts. The above shows a sequential dog clutch design that can incorporate several forward gears and a reverse gear.
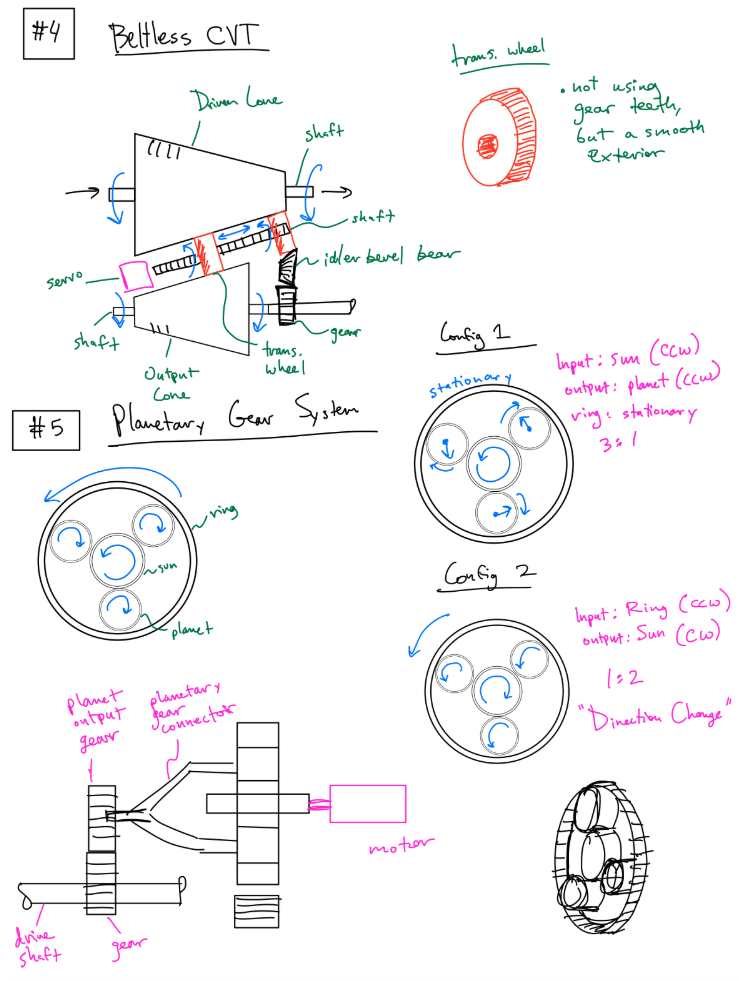
Sketches of transmission designs were used to illustrate mechanical concepts. The above shows a planetary gear set design as well as a beltless CVT design.
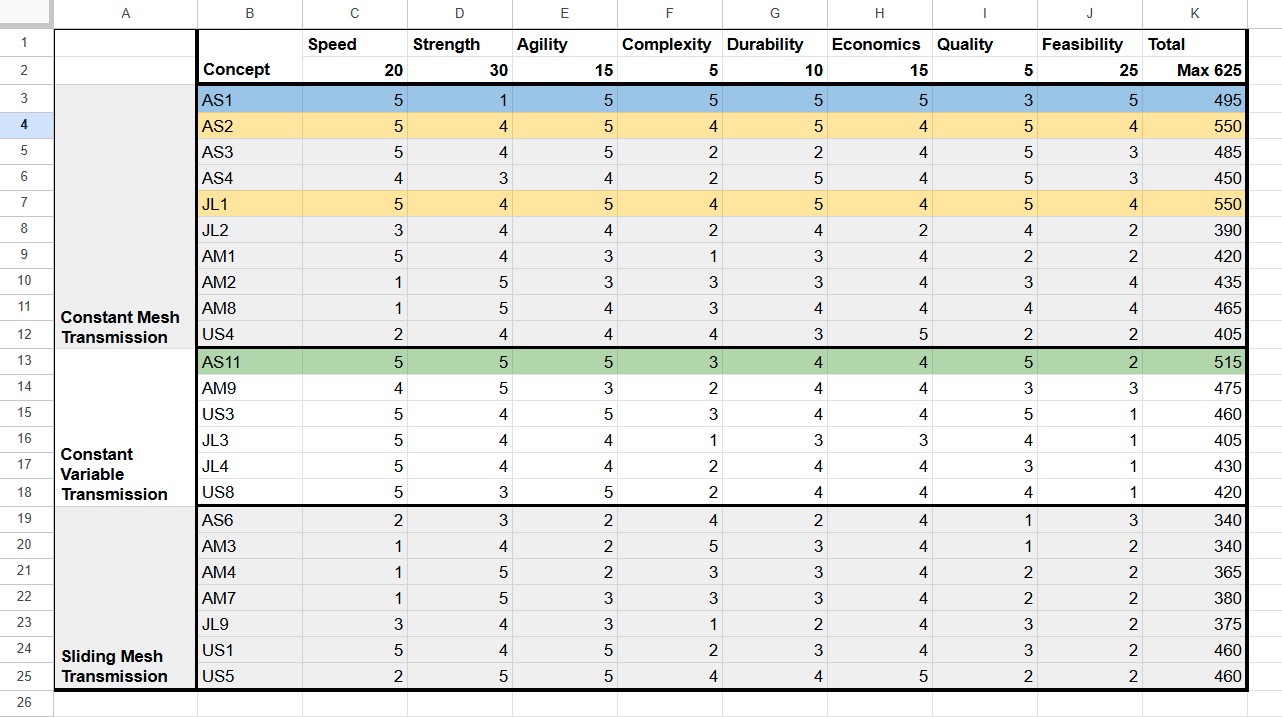
The decision matrix used to select the transmission design.
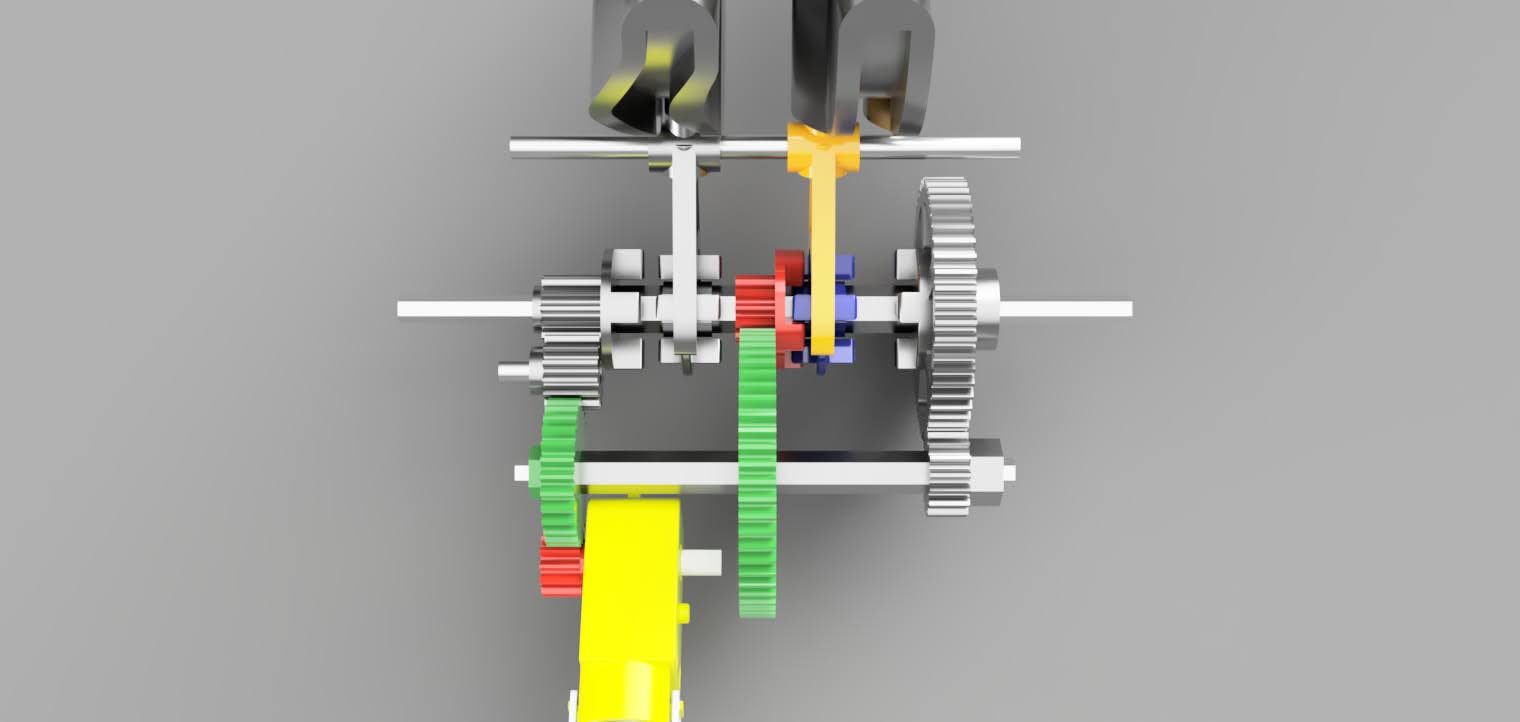
The CAD model of the transmission.
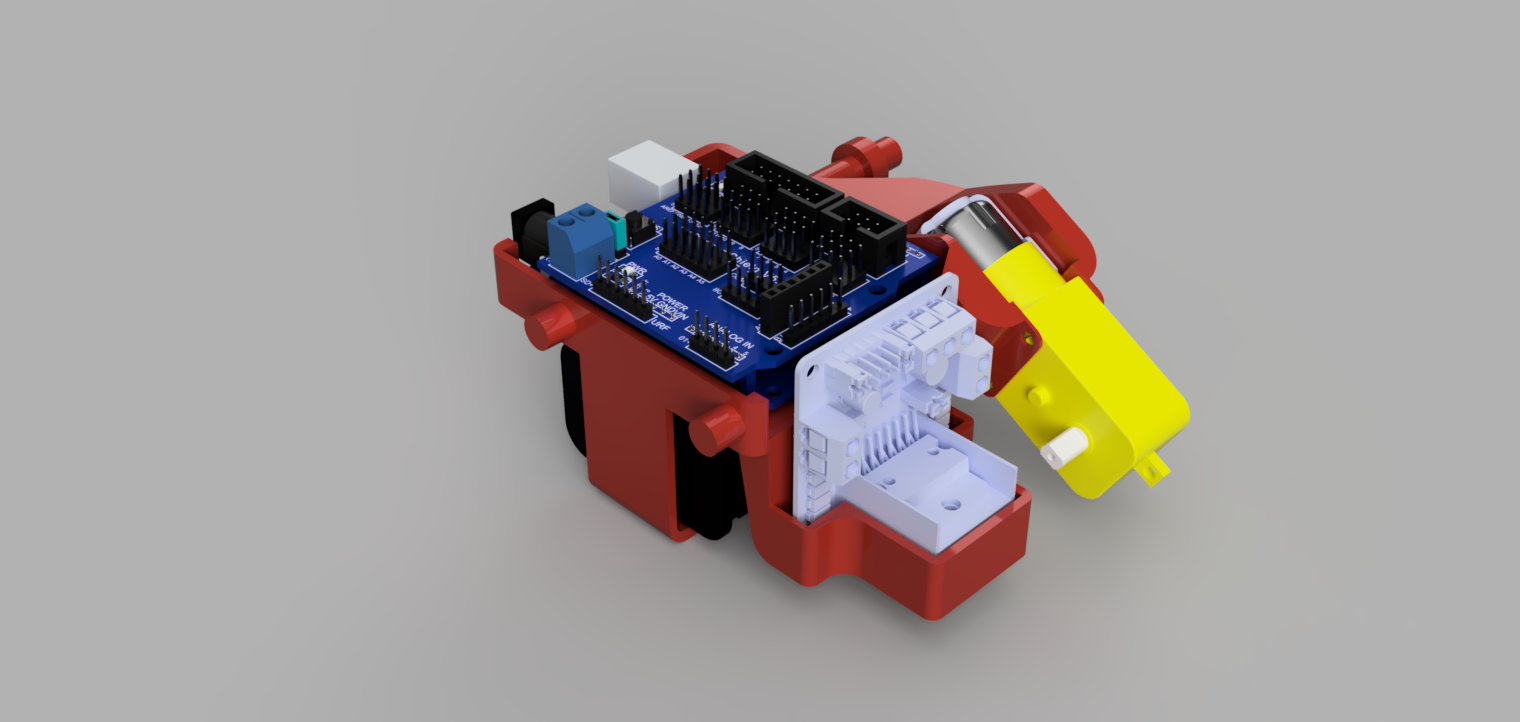
The CAD model of the electronics housing.
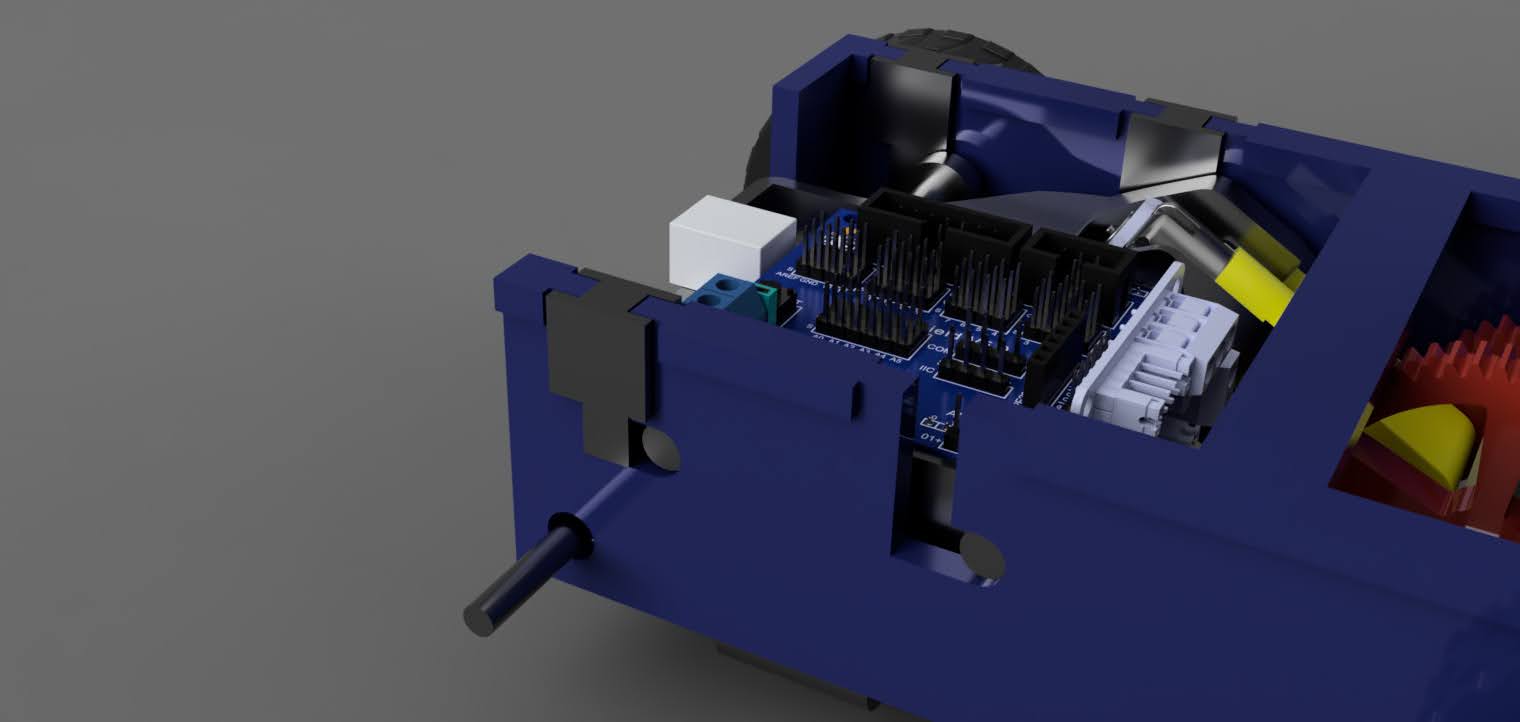
The CAD model of the modular chassis.

The CAD model of the full vehicle.
Outcome
- Achieved top speed of 1.35 m/s, and a towing capability of 2.5 kg up a 15 degree ramp
- Repeatedly impact resistant to over 5 kg dropped from 0.25 m
- Engineered a modular chassis design, enabling the electronics housing to be rapidly removed in less than 30 seconds.
- High agility: 10 traversals of 1 m in less than 60 seconds
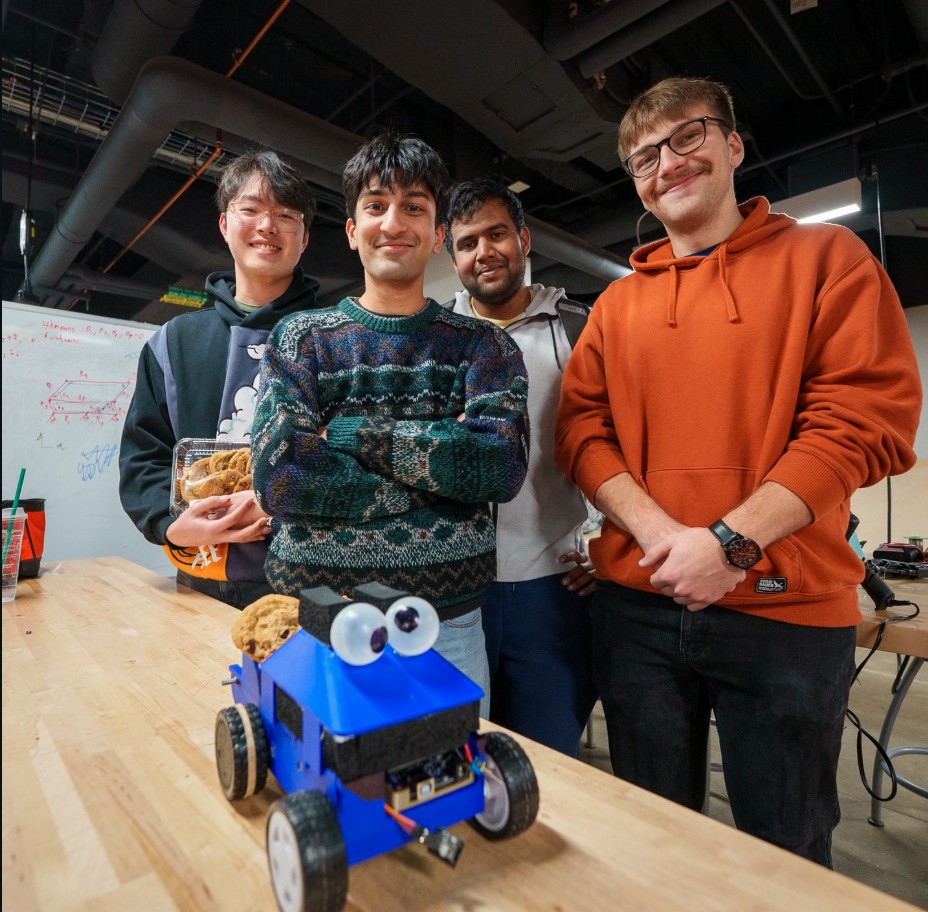
My team and I with our final vehicle at the competition.
Contributions
- Executed FEA on the chassis, verifying ~2.7 FoS (impact) and >8 FoS (normal operation).
- Derived optimal gear ratios using targeted performance metrics.
- Created CAD models of the transmission components, chassis, and impact survival mechanism.
- Performed CAD model verification prior to 3D printing.
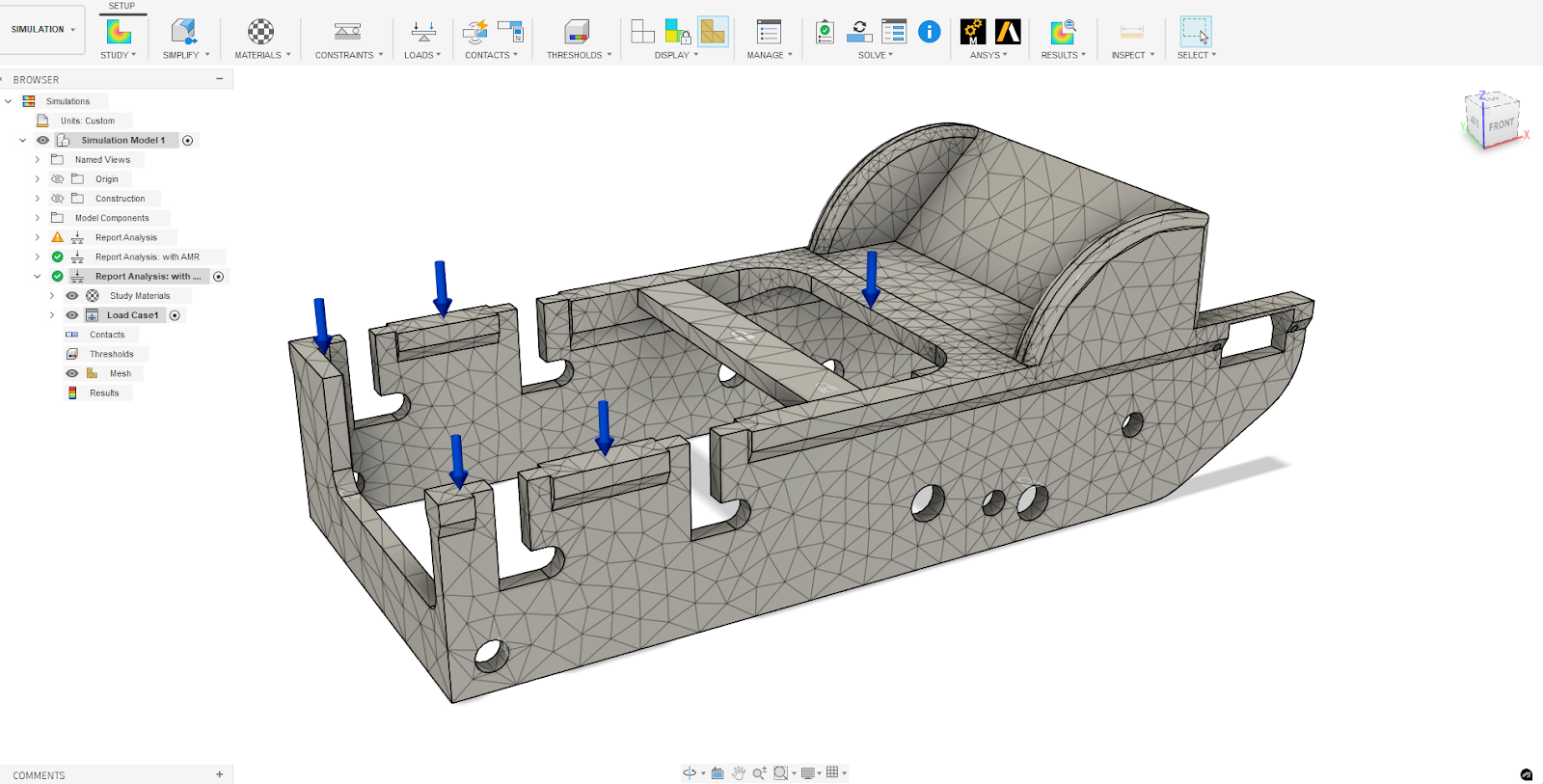
The FEA mesh of the chassis, set using the adaptive mesh refinement tool in Fusion 360.
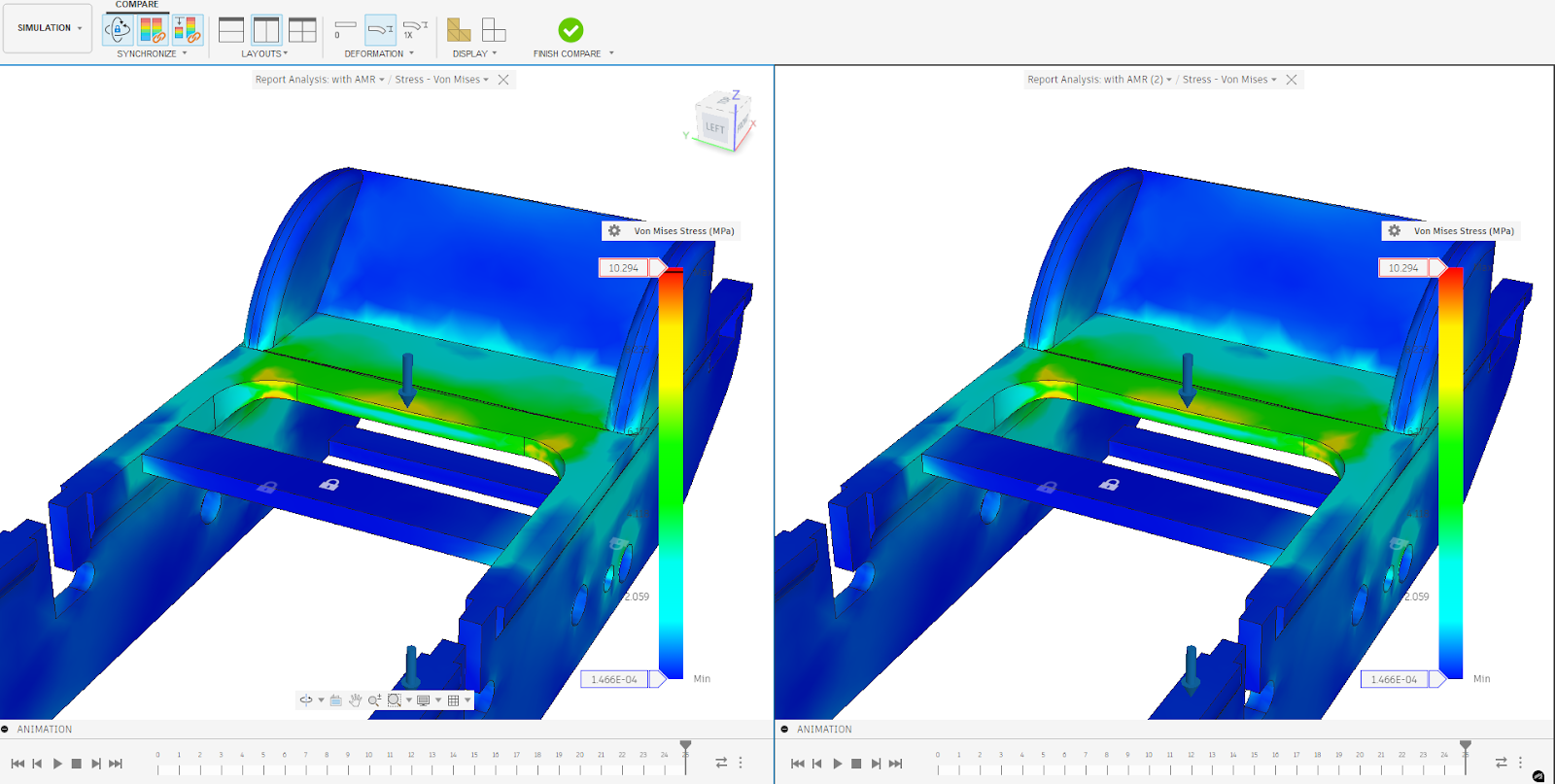
The von Mises stress results of the chassis during an impact, showing convergence to the true stress value. (Left: Coarse Mesh, Right: Fine Mesh)
Engineering Takeaways
- Version control of products is necessary when using rapid prototyping.
- FEA is a powerful tool for verifying the structural integrity of a design.
- Tolerance analysis is and remains a critical aspect of design verification.