RC Battle Bot
Designing and manufacturing an 85 lb RC Battle Bot with a high inertia vertical spinner.

Isometric view of the final Battle Bot, "Flipside".
Problem
- Design, manufacture, and test an 85 lb RC Battle Bot- with a primary weapon designed to eliminate other weapon/wedge-based robots.
- Successfully integrate off the shelf components with a custom built chassis and weapon to create a functioning Battle Bot.
Approach
- Sourced an AmpFlow A28-150 3 HP Neodymium motor to drive the battle bot and its weapon.
- Selected a vertical spinner as our weapon morphology.
- Integrated a 24V DC battery pack along with an ESC for RC control, with a manual killswitch.
- Selected square steel tubing for our chassis, with polycarbonate plate armor for exterior protection.
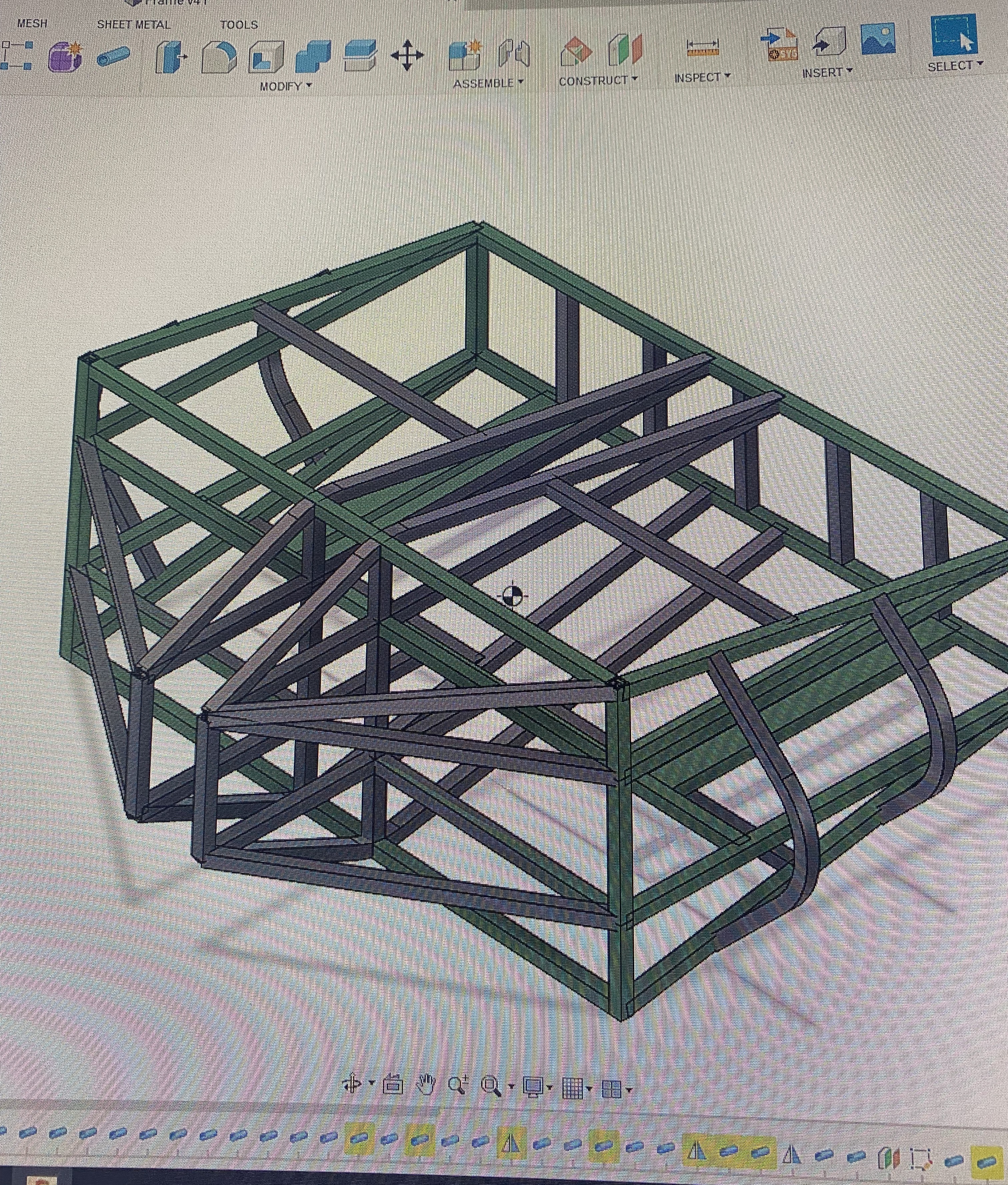
Design of the Battle Bot chassis in Fusion 360.
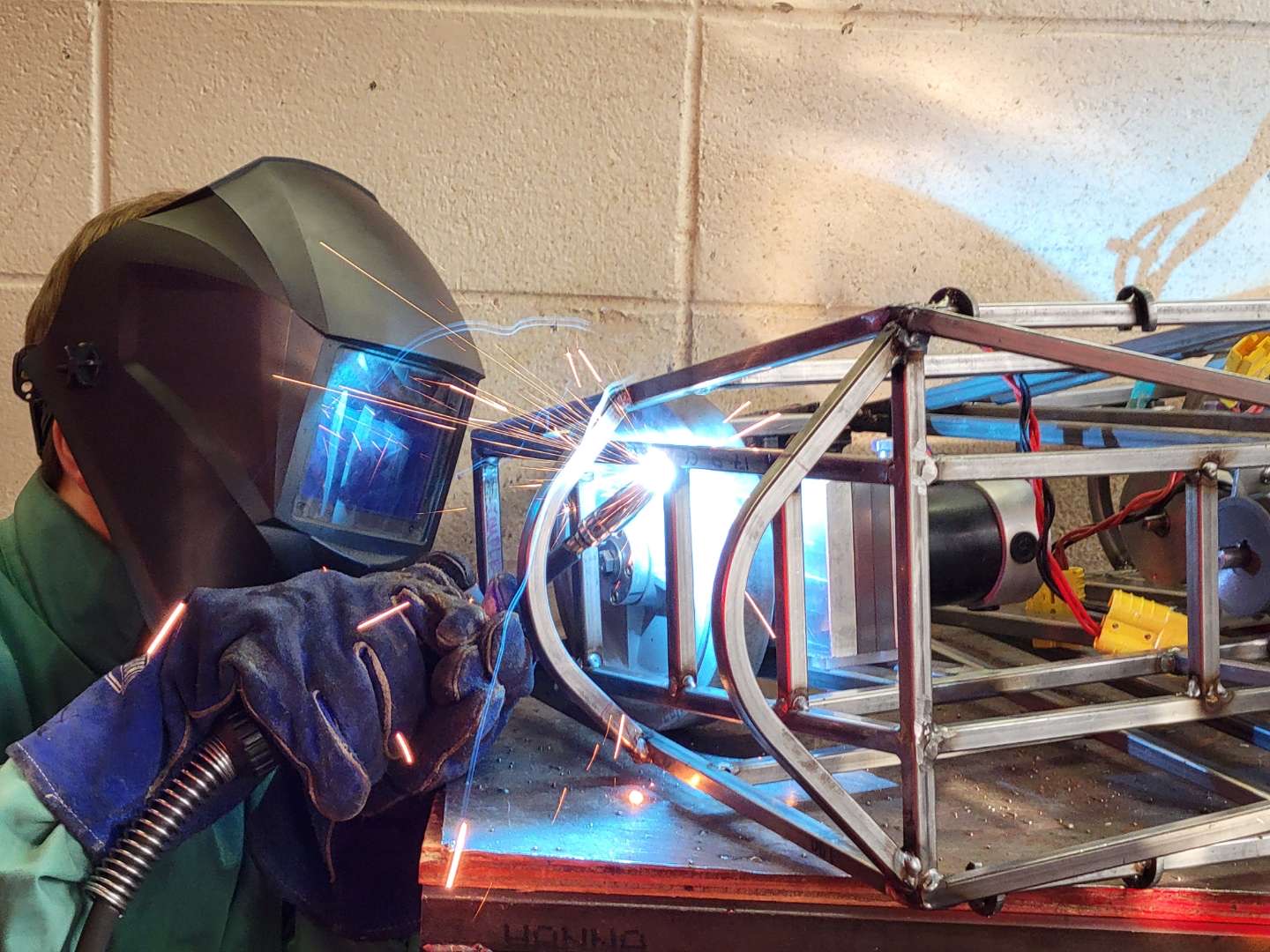
MIG Welding the Battle Bot chassis.

Skeleton frame of the Battle Bot chassis.
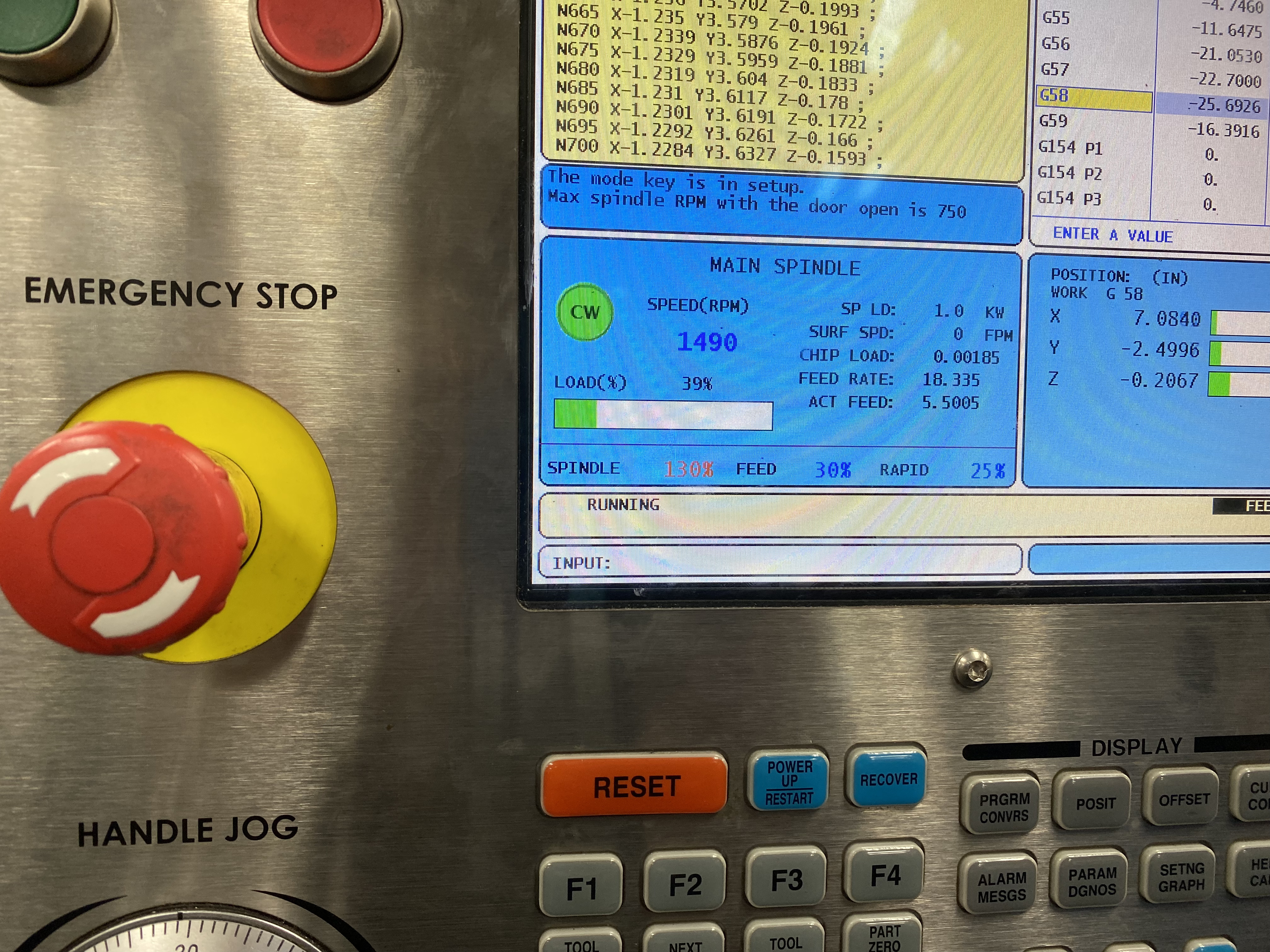
G-code of the toolpath in the CNC mill for the weapon.
The milling of the weapon in a HAAS CNC mill.

Half the weapon assembly after machining. Photo includes one steel tooth below, followed by the polycarbonate gear, and steel pins to secure the assembly.
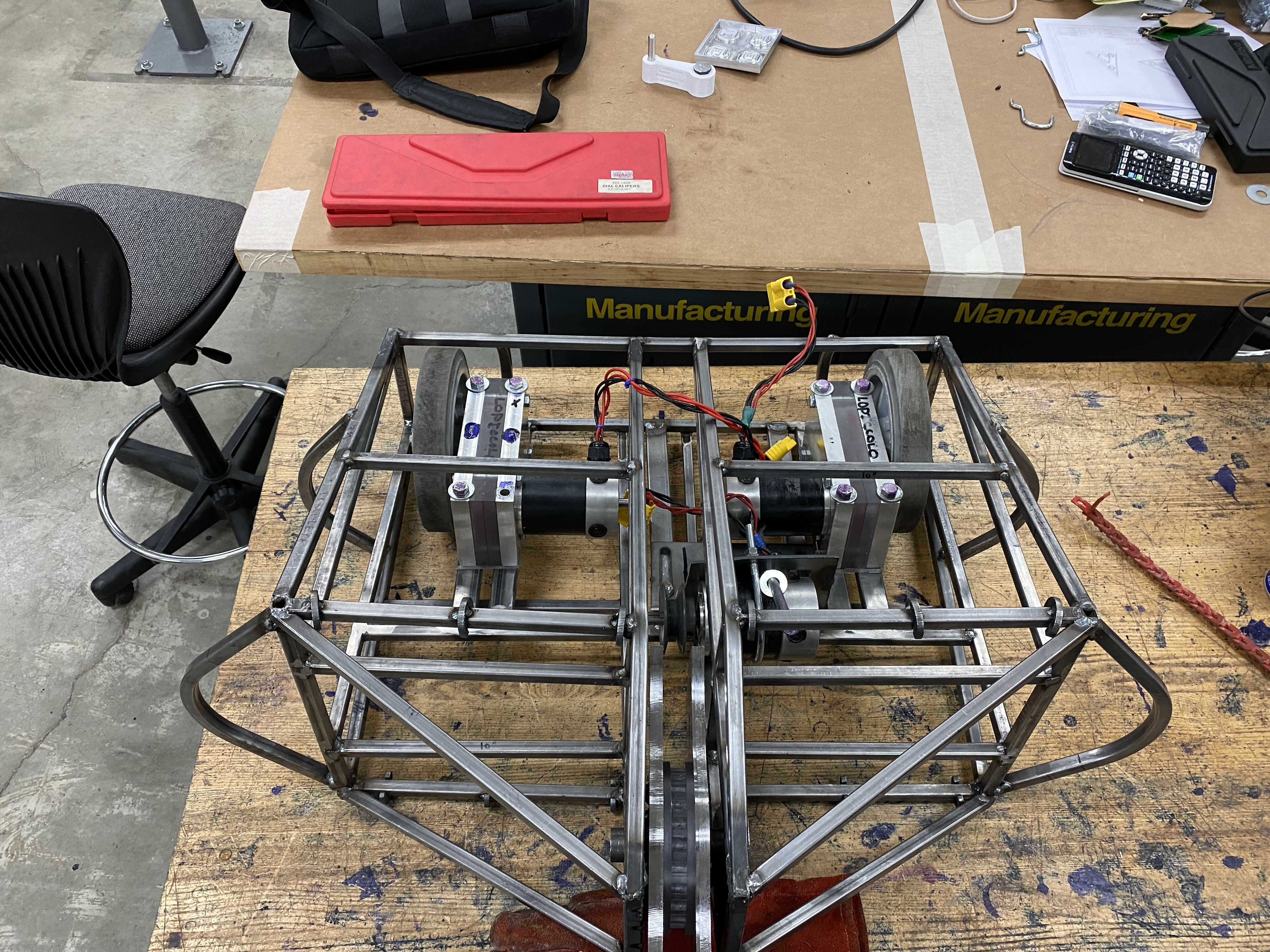
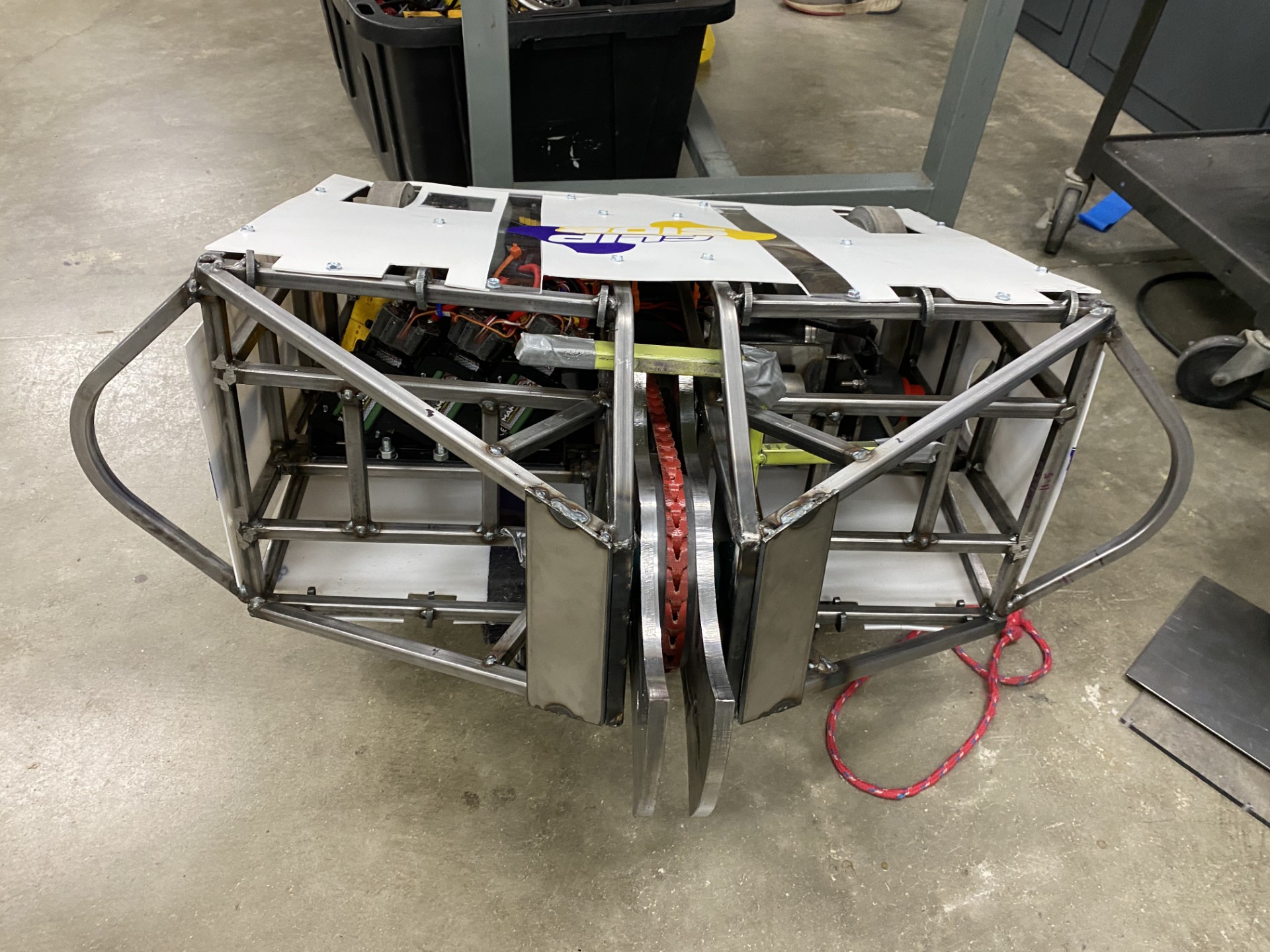
The Battle Bot chassis with the weapon assembly mounted.

The weapon assembly being weighed, meeting the weight limit.

The Battle Bot chassis and weapon assembly being weighed, meeting the 85 lb. weight limit.
Outcome
- Utilized Fusion 360 CAM to create toolpaths for the Haas VF-2 CNC mill to manufacture the weapon assembly.
- "Flipside" was a fully reversible, 360 degree invertible, and dominant Battle Bot.
- Designed custom weapon motor mount, and ESC mount to integrate with our chassis.
- Achieved excellent weld quality on the chassis- with no support structures experiencing any failure during combat.

Flipside in a side profile view.
Flipside in front view.
Flipside in combat.

Flipside after combat- with no chassis failures shown.
Contributions
- Designed and manufactured the Battle Bot chassis and weapon assembly.
- Utilized Fusion 360 CAM to create toolpaths for the Haas VF-2 CNC mill to manufacture the weapon assembly.
- Led the student team in task delegation during design/manufacturing stages, and provided technical guidance.
Engineering Takeaways
- GD&T and tolerance analysis is critical for ensuring combat robot performance meets expectations.
- CAM simulation is critical to verify that parameters for manufacturing processes are correct.
- Material properties like the yield strength have real world implications for the performance of mechanical systems.