Rope-Crawler Robot
An open-loop, rope-traversing robot that creatively meets performance and aesthetic criteria.

The completed rope-crawler robot, called "Slothimus Prime" due to our aesthetic design choice.
Problem
- Construct a rope-traversing robot, capable of achieving a minimum speed, size, quality, and aesthetic requirements.
Approach and Design Process
- Understand design criteria by creating a Product Design Specification (PDS) list
- Utilized low fidelity prototyping to test 4-bar linkage system dynamics
- Executed Torque-Speed curve analysis for the DC motor to estimate performance
- Simulated dynamic performance using position, velocity, and acceleration (PVA) analysis in Python
Testing the 4-bar linkage low-fidelity prototype.
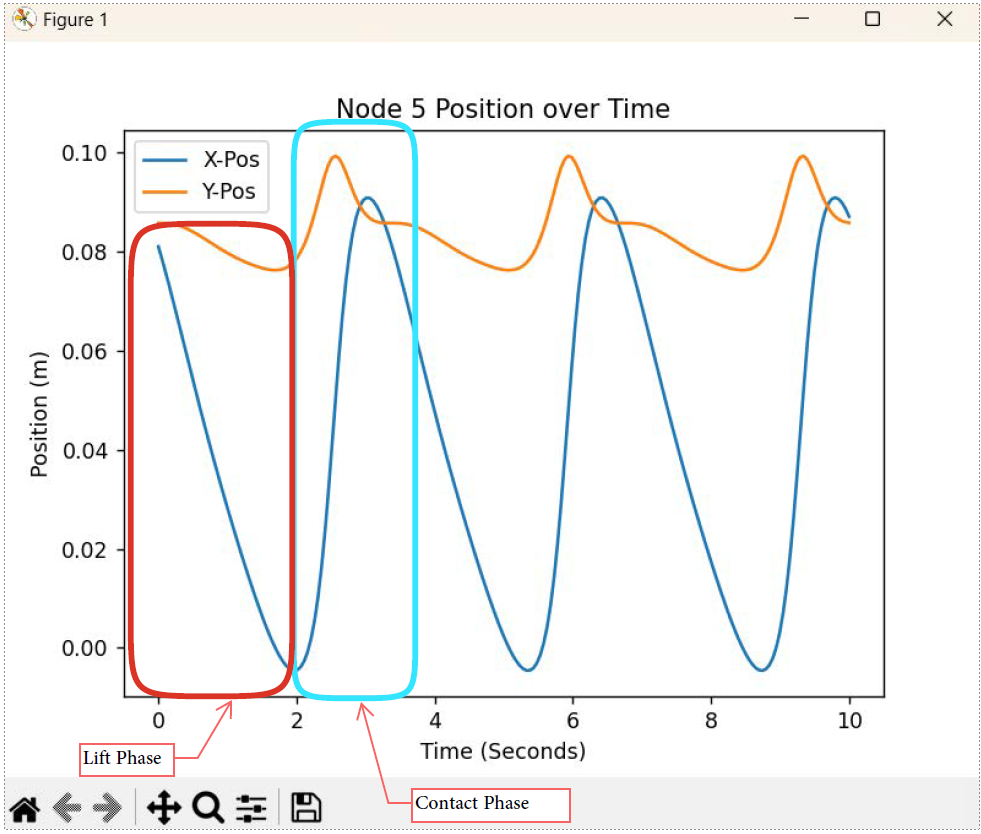
Dynamic analysis performed in Python for 4-bar linkage geometry.
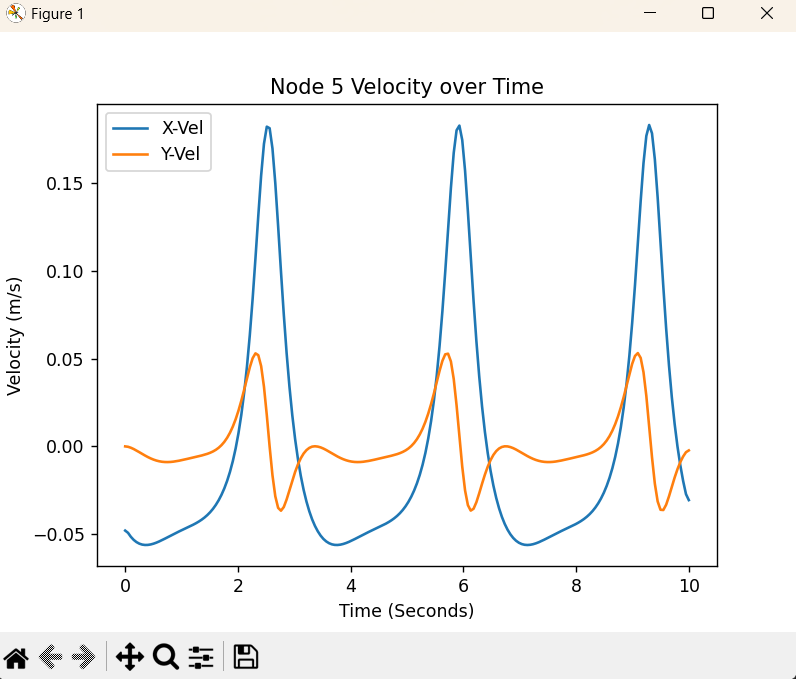
Dynamic analysis performed in Python for 4-bar linkage geometry.
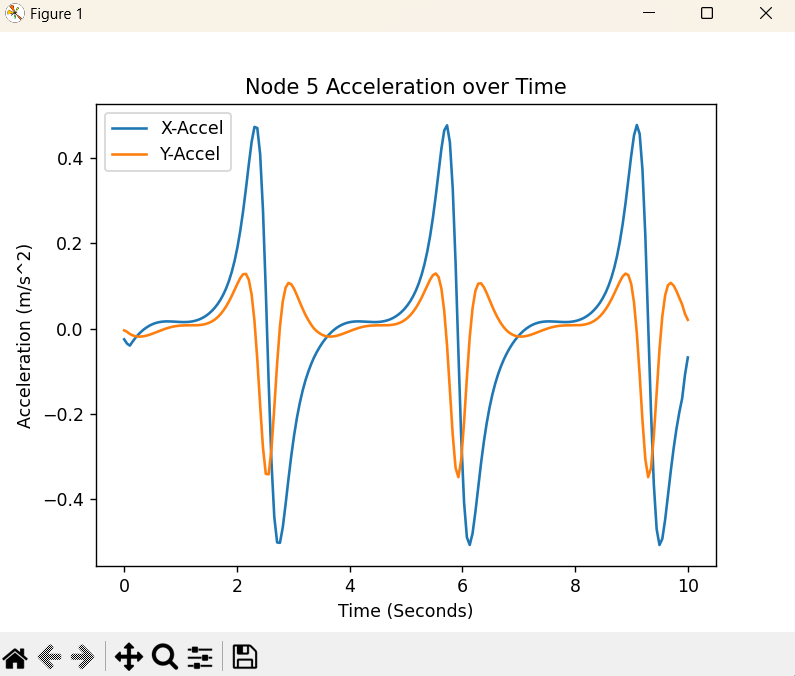
Dynamic analysis performed in Python for 4-bar linkage geometry.
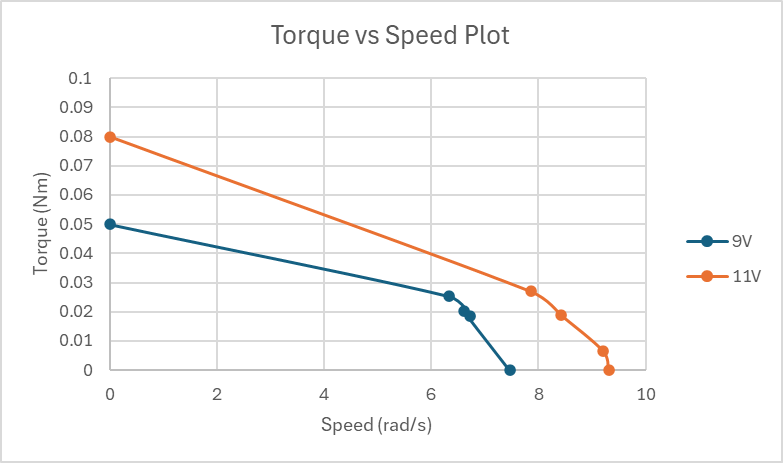
Torque-speed curve plotted for the DC motor.
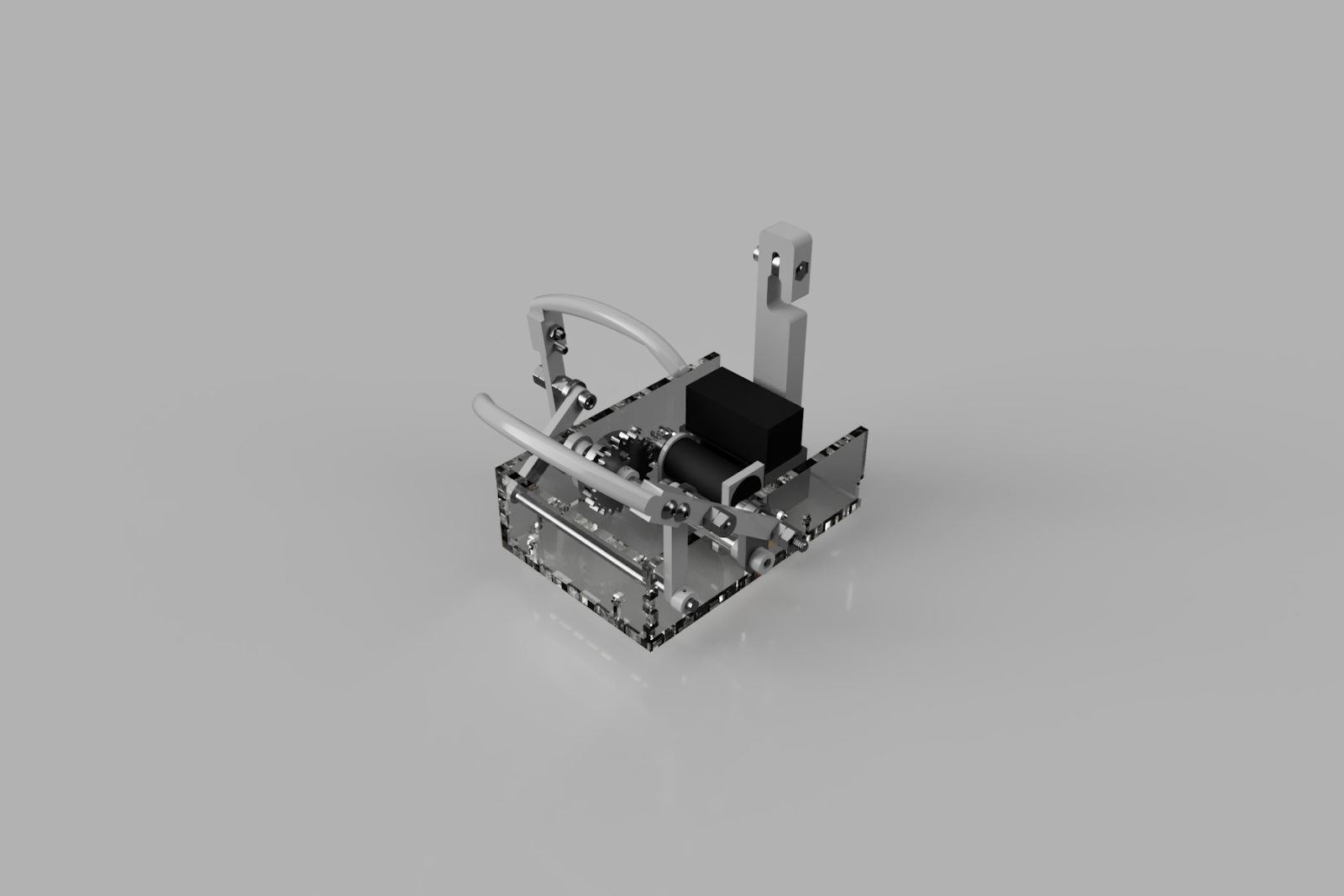
CAD render in Fusion 360 of the rope-crawler robot.
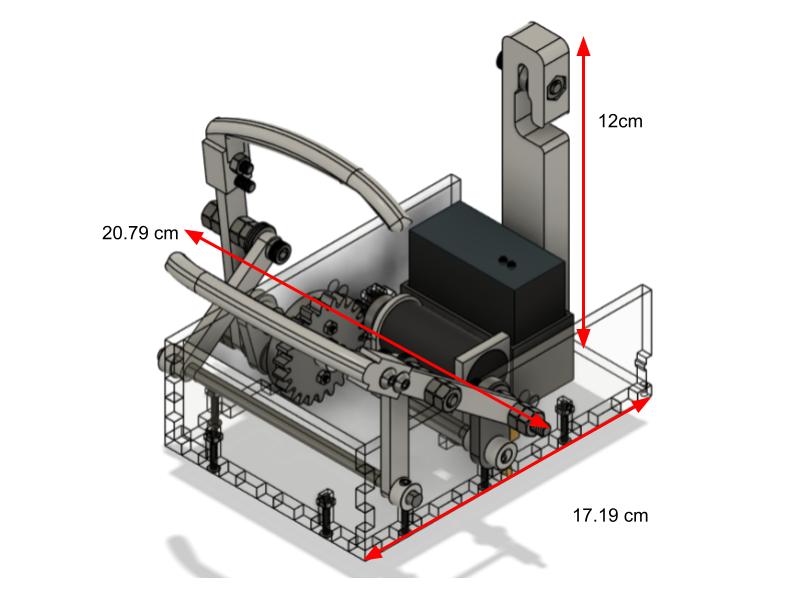
Dimensions of the rope-crawler robot.
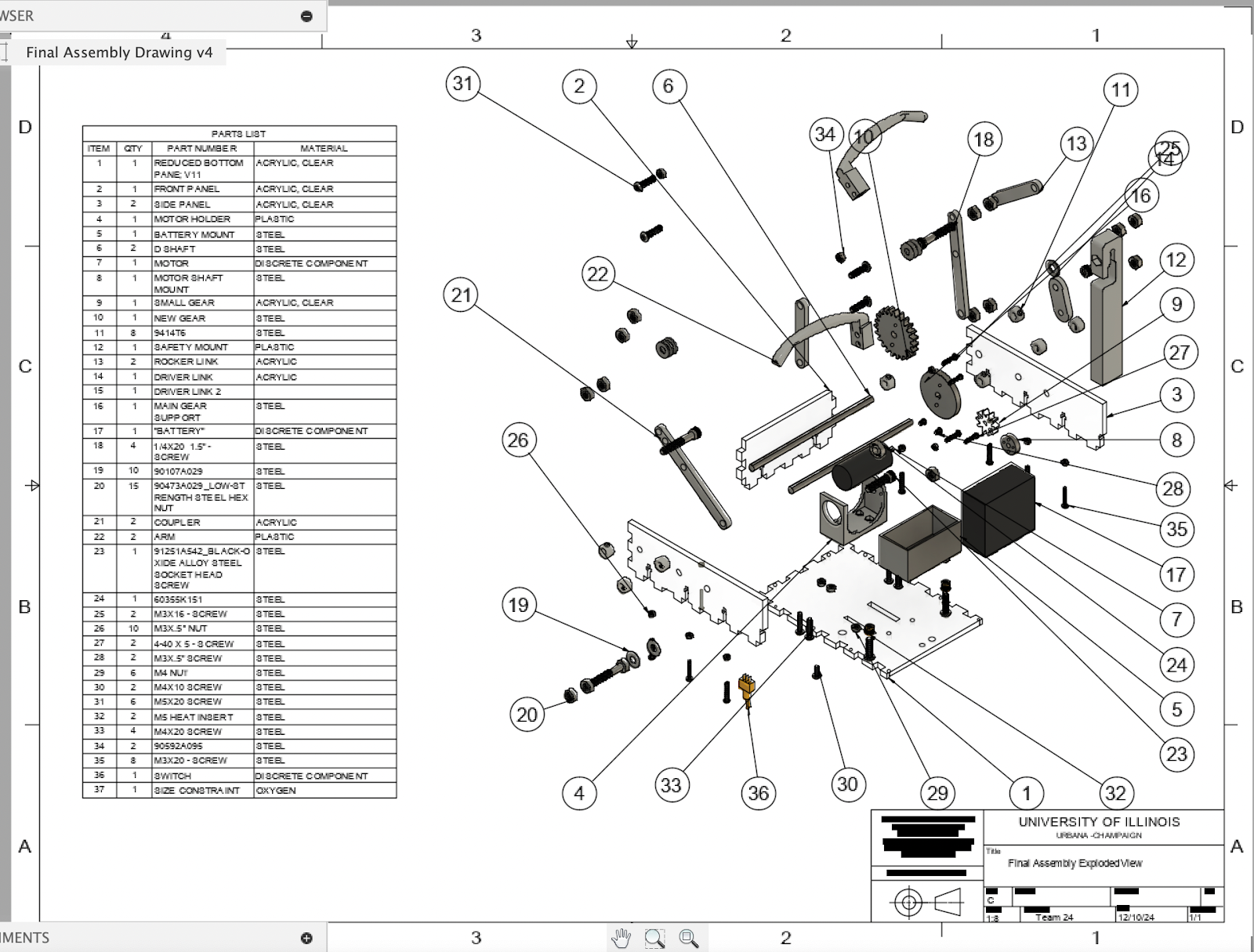
Exploded view of the rope-crawler robot.
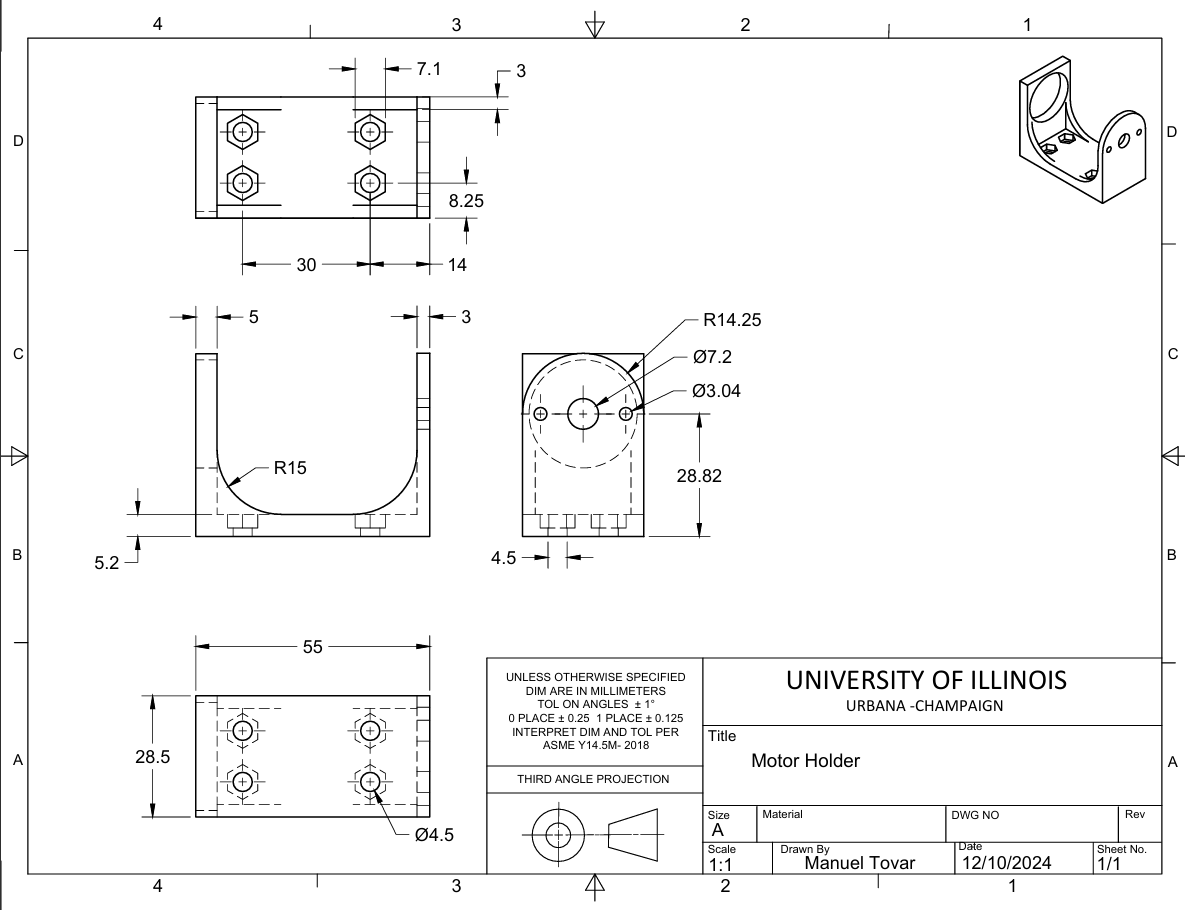
Motor mount of the rope-crawler robot.
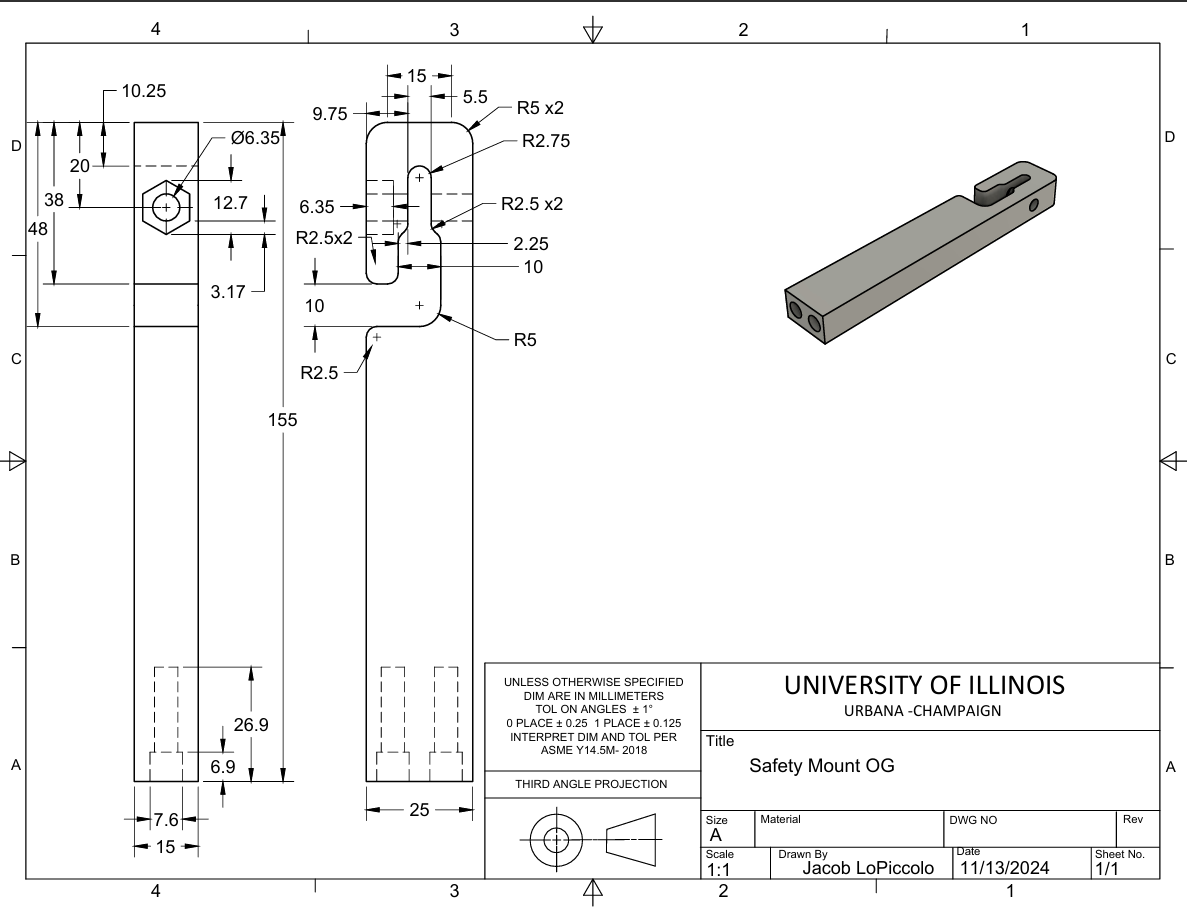
Safety mount of the rope-crawler robot.
Testing of the rope-crawler robot.
Outcome
- Achieved a maximum traversal speed of 11.5 m/min, a ~670% increase from the baseline
- Fit within the 12x18x30 cm^3 volume constraints for the robot
- Successfully implemented a safety mount with an integrated bearing to prevent falls and minimize dynamic friction with the rope
Final performance of the rope-crawler robot.
Contributions
- Simulated dynamic performance using position, velocity, and acceleration (PVA) analysis in Python
- Modeled and implemented innovative chassis fastening method using laser cut acrylic joining techniques
- Designed a safety mount to prevent falls and minimize dynamic friction with the rope
- Executed manufacturing of robot chassis using laser cutting and FDM 3D printing
Engineering Takeaways
- Simulations give an approximation for real-world performance, testing is necessary to validate results
- Completing dynamic PVA analysis in Python was essential to understand the desired robot motion.
- Robot-environment interaction is complex and cannot be overlooked in the design process.